Arduino cansat and IMUs
lidt ældre tekst
Drivere kan findes her (opdateret apr 2022)
Very common IMU boards are GY80 and GY87 GY88 GY88a and GY91
A cloned board is HW-290 with qm35883 instead of hmc5883
Warning: GY-91 is sometimes NOT a GY-91 board with MPU9250 etc.
See in table. Even though components looks alike a GY-91 its just a MPU6000 that is real.
I have seen MPU6000 with MPU9250 printed on top …
Beware
Its a good idea to use an I2C scanner to see what is present
They are all 10 DOF (degree of freedom) boards and all sensor handling is by i2c bus.
GY boards
| GY-80 | GY-87 | GY-88 | GY-88A | GY-91 | fake GY-91 | HW-290 | |
| digital compass | hmc5883L | hmc5883L | hmc5883L | hmc5983 | mpu9250 | none | qmc5883 |
| pressure and temperature | bmp085 | 1 bmp085/180 | bmp085/180 | bmp180 | bmp280 | none | bmp085 |
| 3 axis accelerometer | adxl345 | mpu6050 | mpu6050 | mpu6050 | mpu9250 | MPU6000 | mpu6050 |
| 3 axis digital gyro | l3g4200d | mpu6050 | mpu6050 | mpu6050 | mpu9250 | MPU6000 | mpu6050 |
| schematics | schematics | schematics | schematics | schematics | schematics | none | schematics |
{kind=link}
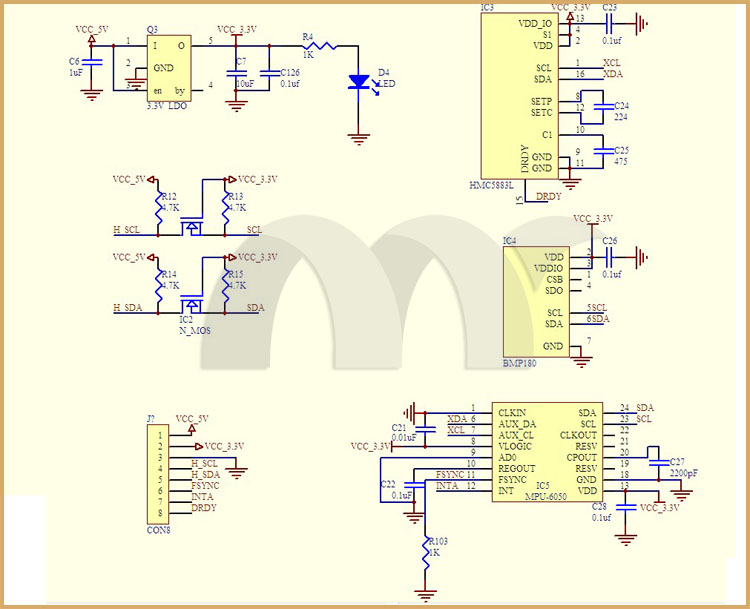{kind=link}
{kind=link}
{kind=link}
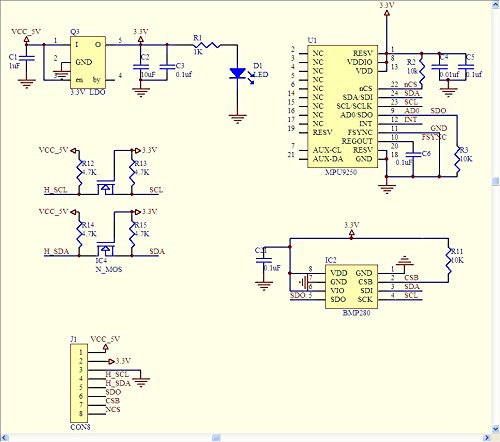{kind=link}
Notes:
on the boards with MPU6050 the the hmc5883L accelerometer is located on a secundary I2C bus behind the MPU6050
See snippets code below
See full code here
#include <Wire.h>
#include <MPU6050.h>
#include <hmc5883l.h>
#include <bmp085.h>
#include "I2Cdev.h"
MPU6050 mpu;
hmc5883l compass;
int error;
void setup() {
...
// 2000 degrees pr second max and +/- 16 g max
mpu.begin(MPU6050_SCALE_2000DPS, MPU6050_RANGE_16G);
mpu.setI2CBypassEnabled(true); // set bypass mode for gateway to hmc5883L
// now we can reach hmc5883L
compass = hmc5883l(); // Construct a new HMC5883 compass.
...
Datasheets and library SW
Src folder list: here
You install the ZIP file libraries as usual:
download library
sketch->Include library/ add .ZIP file
install
Some might use bmp180/280 which are a plugin compatible sucessors to bmp085.
Extra info
Plug in replacement
GY-80 and GY-87 can both be used on the AAU cansat shield version 4.
The GY-80 fills all holes - the GY-87 shall be located most far away from the openlog as shown on image below.
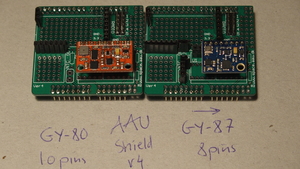 |