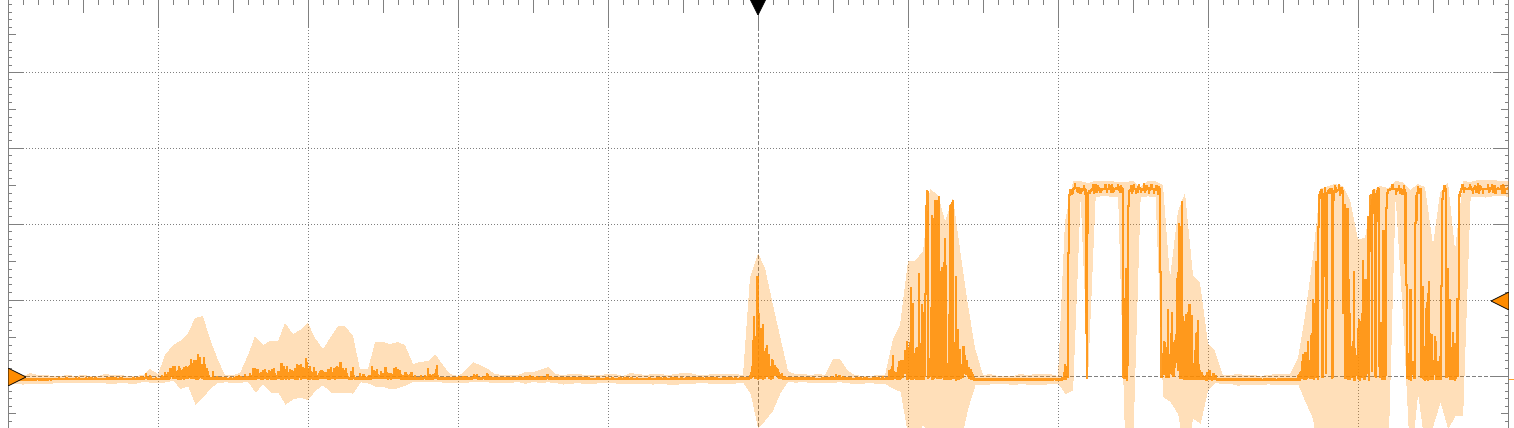
Bouncing
on way - maybe
history short
pinMode(2,INPUT_PULLUP) high is idle level
switch to ground
39 nF between input on ground (pict nr 2 from top)
lock in ISR to intr with xx msecs is ignored
Arduino code (for UNO) in buttom deadtime is 10 msec
So dont press button more then 20 times a second …
newest img in top
bounce100msecbuttonstorcapacitor.png 470 nF
 |
bounce50mseccapacitor.png 39 nF
 |
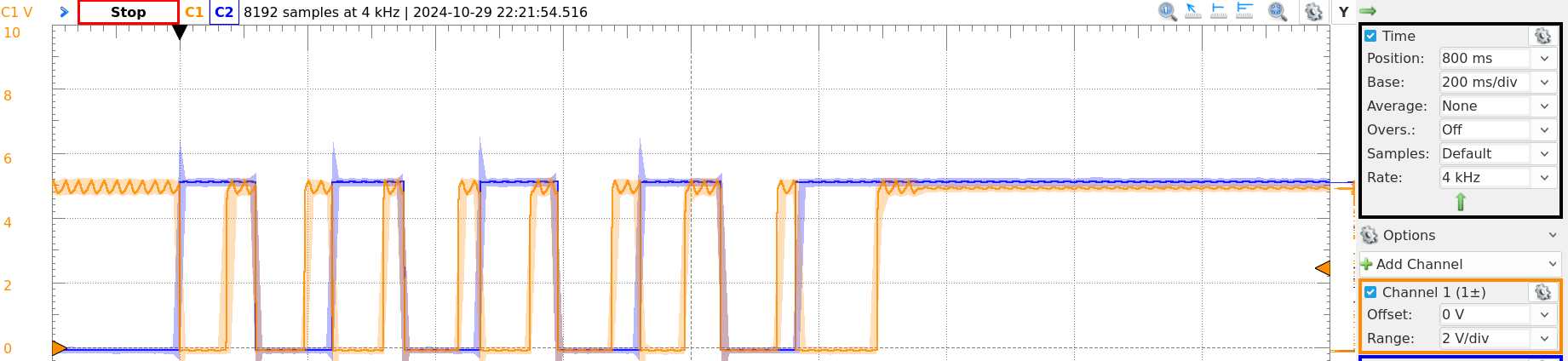
bounce200msecbuttoncapacitor.png 39 nF
 |
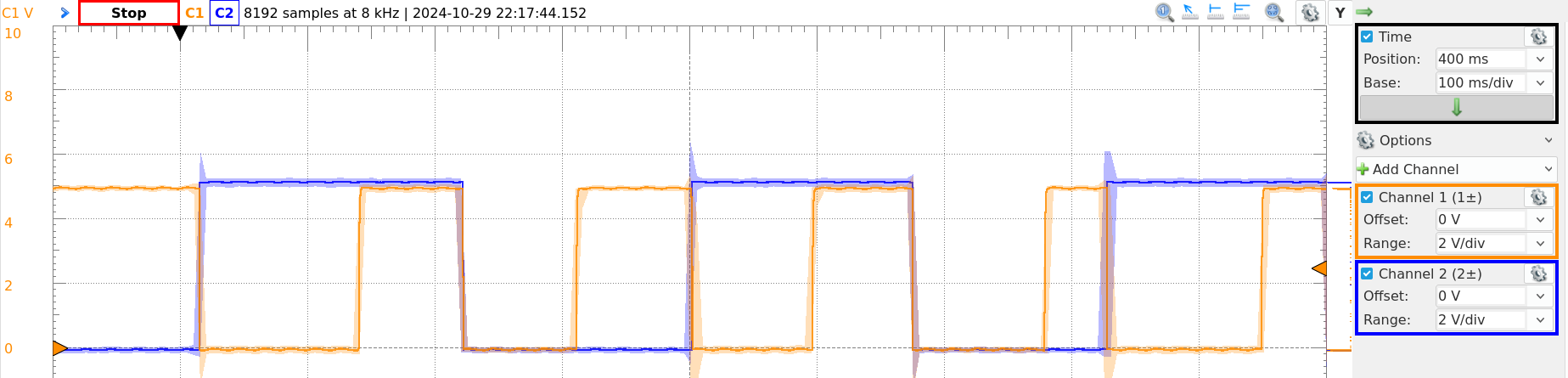
bounce100msecbuttoncapacitor.png
 |
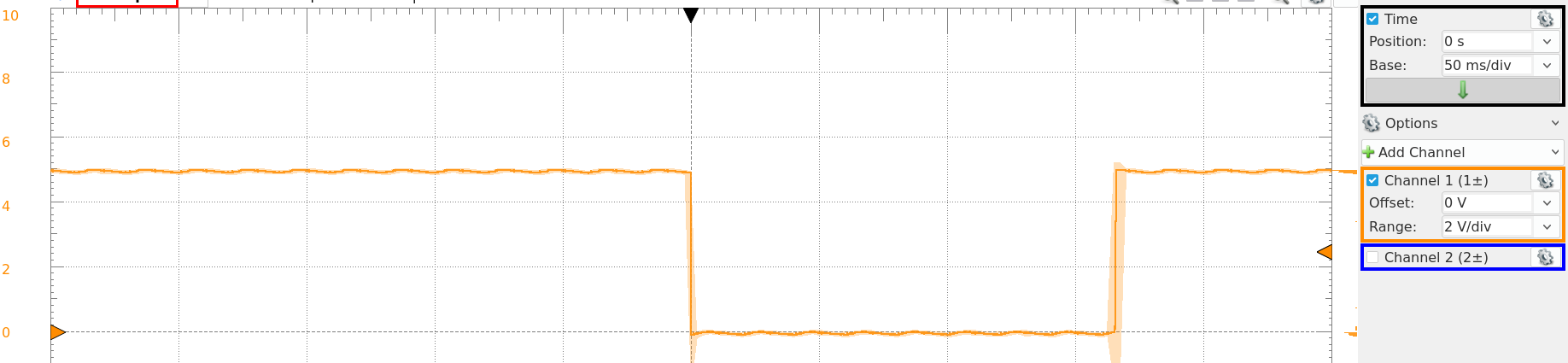
bounce50msecpin.png
 |
bounce50msecbutton.png
 |
bounce5msecpin.png
 |
bounc1msecbutton.png
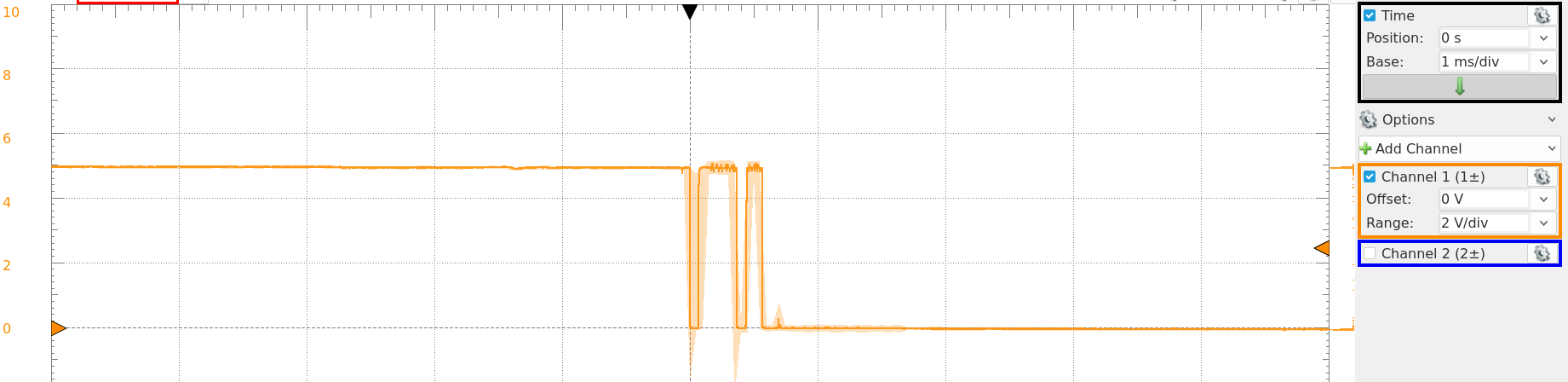 |
bounce1msecpin.png
 |
bounce5msec.png
 |
/*
INTERRUPTS
Arduino uno/mega
https://jensd.dk/edu/doc/arduino/ards.html
is an pin overview . Look for pins marked INT0, INT1,...
Board int.0 int.1 int.2 int.3 int.4 int.5
Uno, Ethernet 2 3
Mega2560 2 3 21 20 19 18
*/
const int pin = 2; //define interrupt pin to 2
const int respPin = 13;
volatile int state = LOW; // To make sure variables shared between an ISR
//the main program are updated correctly,declare them as volatile.
volatile int intCnt = 0;
volatile unsigned long last = 0;
boolean p8 = false;
void blinkk() {
//ISR function
if (30 <= (millis() - last)) { // at least 30 msec between two intr
intCnt++;
last = millis();
state = !state; //toggle the state when the interrupt occurs
digitalWrite(8, (p8 = !p8));
}
}
void setup() {
Serial.begin(115200);
pinMode(respPin, OUTPUT); //set pin 13 as output
pinMode(pin, INPUT_PULLUP); // intr on pin 2 (UNO)
pinMode(8, OUTPUT); // for togling every time an intr is received
digitalWrite(8, LOW);
attachInterrupt(digitalPinToInterrupt(pin), blinkk, FALLING); //CHANGE);
}
int oldCnt = 0;
void loop() {
/*
if (old != intCnt) {
Serial.println(intCnt);
old = intCnt;
}
*/
// DEBUG
if (oldCnt != intCnt) {
oldCnt = intCnt;
Serial.println(oldCnt);
}
digitalWrite(respPin, state); //pin 13 equal the state value
}
Jens
THE BEER-WARE LICENSE (Revision v 42)
jensd@jensd.dk wrote this file.
As long as you retain this notice you can do whatever you want with this stuff on these pages.
If we meet some day, and you think this stuff is worth it, you can buy me a beer in return :-)
(C) Jens Dalsgaard Nielsen
credit for license this goes to phk@FreeBSD.ORG

As long as you retain this notice you can do whatever you want with this stuff on these pages.
If we meet some day, and you think this stuff is worth it, you can buy me a beer in return :-)
(C) Jens Dalsgaard Nielsen
credit for license this goes to phk@FreeBSD.ORG